|
Sixu Yan |
鄢思旭
Hi, I am Sixu, a first-year Ph.D. student at the HUST Vision Lab (HUSTVL), Artificial Intelligence Institute, School of EIC, Huazhong University of Science and Technology (HUST), advised by Prof. Xinggang Wang. Prior to that, I received my M.S. degree from the School of ME at Shanghai Jiao Tong University (SJTU), where I conducted research in the Robot Control and Machine Vision Lab (RCMVL) at the Institute of Robotics, under the supervision of Prof. Han Ding and Prof. Zhenhua Xiong.
My research goal is to develop general-purpose cognitive robots. Currently, I focus on scaling up robotic dexterous manipulation through large-scale synthetic data generation and sim-to-real transfer. My prior work includes motion planning and imitation learning. During my Ph.D., I have been fortunate to collaborate closely with Dr. Hangxin Liu, Dr. Zeyu Zhang, and Prof. Song-Chun Zhu from the Beijing Institute for General Artificial Intelligence (BIGAI).
“Stay curious. Stay humble. Keep building.”
Email /
Google Scholar /
Github /
Twitter /
WeChat
|

|
Research
My research interest is broadly in Robotics and Computer Vision, with a particular focus on generalizable perception and dexterous manipulation in complex environments. My long-term goal is to develop general-purpose cognitive robot systems that can robustly perceive and interact with the real world. Representative works from my Ph.D. research are highlighted below. For a complete list of publications, please refer to my Google Scholar.
|
|
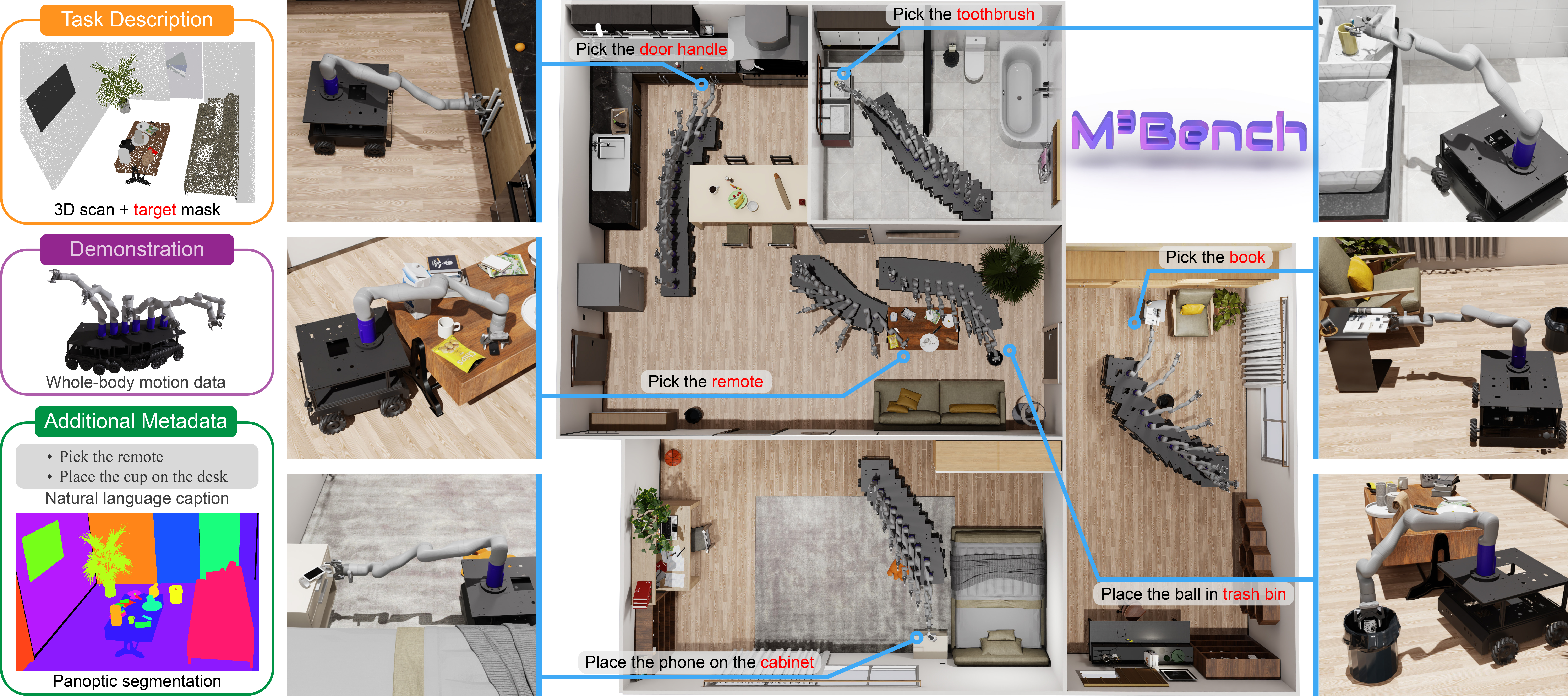
M3Bench: Benchmarking Whole-body Motion Generation for Mobile Manipulation in 3D Scenes
Zeyu Zhang*,
Sixu Yan*,
Muzhi Han,
Zaijin Wang,
Xinggang Wang,
Song-Chun Zhu,
Hangxin Liu✉
(*equal contribution)
Paper /
arXiv /
Project /
YouTube /
BiliBili /
Bibtex
@article{zhang2025m3bench,
title = {M${}^{3}$Bench: Benchmarking Whole-Body Motion Generation for Mobile Manipulation in 3D Scenes},
author = {Zhang, Zeyu and Yan, Sixu and Han, Muzhi and Wang, Zaijin and Wang, Xinggang and Zhu, Song-Chun and Liu, Hangxin},
journal = {IEEE Robotics and Automation Letters},
year = {2025},
volume = {10},
number = {7},
pages = {7286-7293},
publisher = {IEEE}
}
IEEE Robotics and Automation Letters (RA-L) 2025
We propose M3Bench, a large-scale benchmark and data generation toolkit for evaluating whole-body motion generation in mobile manipulation. It includes over 30,000 pick-and-place tasks across 119 realistic 3D scenes, with expert trajectories generated by VKC planner. Our benchmark supports assessing generalization to novel scenes and objects, and reveals that existing methods struggle with whole-body coordination under task and environmental constraints.
|
|
|
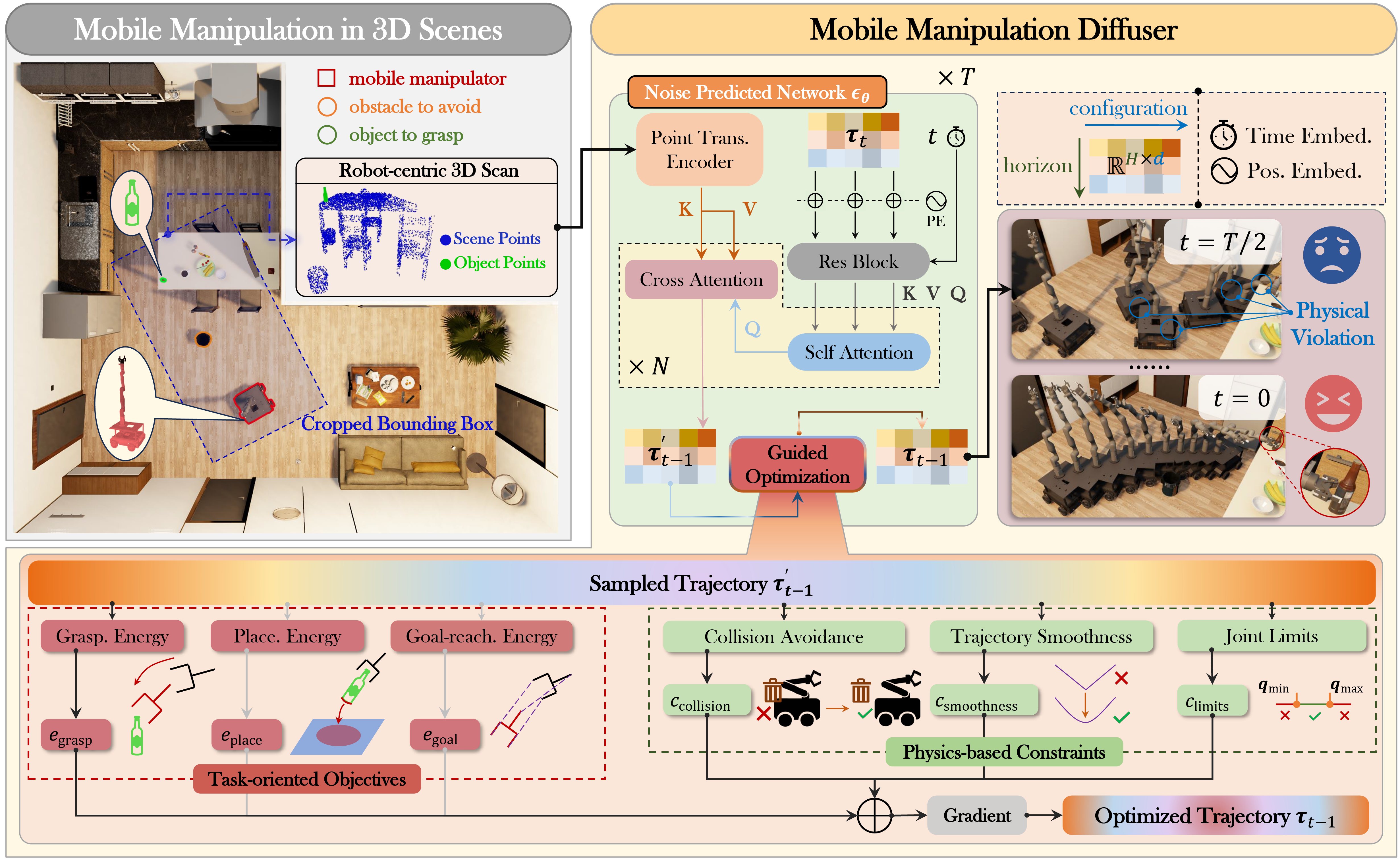
M2Diffuser: Diffusion-based Trajectory Optimization for Mobile Manipulation in 3D Scenes
Sixu Yan,
Zeyu Zhang,
Muzhi Han,
Zaijin Wang,
Qi Xie,
Zhitian Li,
Zhehan Li,
Hangxin Liu✉,
Xinggang Wang✉,
Song-Chun Zhu
Paper /
arXiv /
Project /
Code /
YouTube /
BiliBili /
Bibtex
@article{yan2025m2diffuser,
title = {M2Diffuser: Diffusion-based Trajectory Optimization for Mobile Manipulation in 3D Scenes},
author = {Yan, Sixu and Zhang, Zeyu and Han, Muzhi and Wang, Zaijin and Xie, Qi and Li, Zhitian and Li, Zhehan and Liu, Hangxin and Wang, Xinggang and Zhu, Song-Chun},
journal = {IEEE Transactions on Pattern Analysis and Machine Intelligence},
year = {2025},
publisher = {IEEE}
}
IEEE Transactions on Pattern Analysis and Machine Intelligence (T-PAMI) 2025
We propose M2Diffuser (Mobile Manipulation Diffuser), a conditional diffusion-based neural motion planner capable of generating full-body coordinated trajectories that satisfy both physical and task constraints. This approach provides a unified framework for motion generation and trajectory optimization in 3D scenes and enables seamless transfer from simulation to real-world robotic platforms.
|
|
|
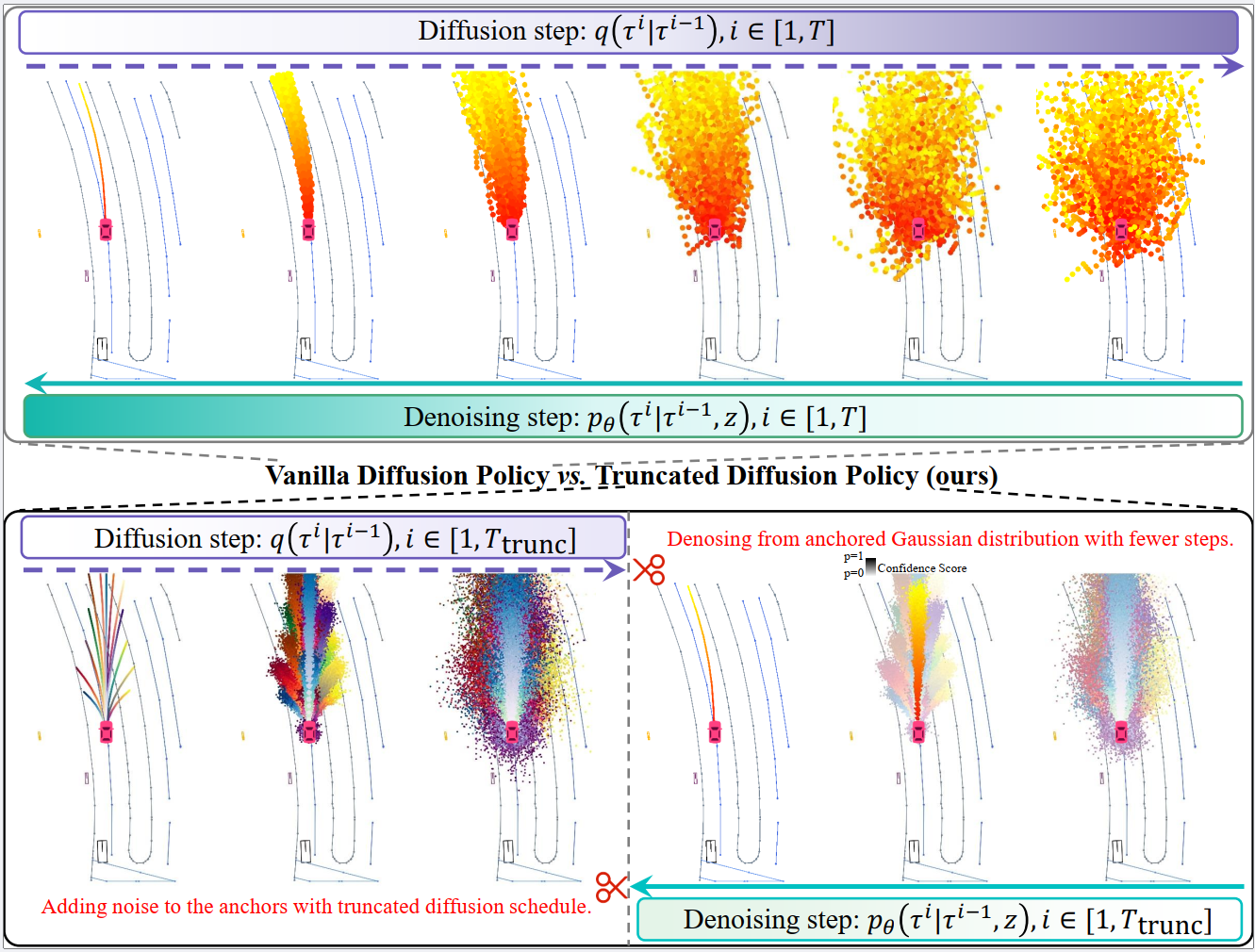
DiffusionDrive: Truncated Diffusion Model for End-to-End Autonomous Driving
Bencheng Liao,
Shaoyu Chen,
Haoran Yin,
Bo Jiang,
Cheng Wang,
Sixu Yan,
Xinbang Zhang,
Xiangyu Li,
Ying Zhang,
Qian Zhang,
Xinggang Wang✉
Paper /
arXiv /
Project /
Code /
Hugging Face /
Bibtex
@InProceedings{liao2025diffusiondrive,
author = {Liao, Bencheng and Chen, Shaoyu and Yin, Haoran and Jiang, Bo and Wang, Cheng and Yan, Sixu and Zhang, Xinbang and Li, Xiangyu and Zhang, Ying and Zhang, Qian and Wang, Xinggang},
title = {DiffusionDrive: Truncated Diffusion Model for End-to-End Autonomous Driving},
booktitle = {Proceedings of the Computer Vision and Pattern Recognition Conference (CVPR)},
year = {2025},
pages = {12037-12047}
}
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) 2025, Highlight
We propose DiffusionDrive, a truncated diffusion-based planner for real-time end-to-end autonomous driving. By injecting multi-mode anchors and reducing the denoising steps to two, it achieves fast inference while maintaining high-quality trajectory prediction. DiffusionDrive outperforms prior methods on the NAVSIM benchmark in both planning accuracy and diversity.
|
Services
Reviewer: The Thirty-Ninth Annual Conference on Neural Information Processing Systems (NeurIPS 2025)
Reviewer: IEEE Robotics and Automation Letters (RA-L 2024)
Reviewer: IEEE International Conference on Robotics and Automation (ICRA 2024)
|
Selected Awards and Honors
|
2023: First-class Comprehensive Academic Scholarship, Shanghai Jiao Tong University
2022: First-class Comprehensive Academic Scholarship, Shanghai Jiao Tong University
2021: National Scholarship (Highest Honor for undergraduates in China)
2021: First-class Scholarship for Academic Excellence, Ocean University of China
2021: Outstanding Individual of the 10th Role Model Program, College of Engineering, OUC
2021: Outstanding Bachelor's Thesis Award, Ocean University of China
2019: First-class Scholarship for Academic Excellence, Ocean University of China
2019: Scholarship for Social Practice, Ocean University of China
2018: First-class Scholarship for Academic Excellence, Ocean University of China
2018: Scholarship for Technological Innovation, Ocean University of China
2019: First Prize, 13th National College Student Energy Saving and Emission Reduction Competition
2019: Honorable Mention (Second Prize), Mathematical Contest in Modeling (MCM)
2019: Second Prize, 10th National Undergraduate Mathematics Competition
2019: First Prize, 9th Shandong Undergraduate Mathematics Competition
2019: First Prize, 2nd Shandong Undergraduate Physics Competition
|
This homepage is designed based on Jon Barron's website and deployed on Github Pages. Last updated: Jun. 16, 2025
© 2025 Sixu Yan
|